photos, graphics and article by Tim Cummins
I originally wrote a short opinion piece article entitled “Scientific Fact: The ‘Traditional’ Understanding of the Ship’s Pivot Point is Wrong! What You Are Seeing is a ‘Trick of the Eye’” and it is still available to view on Marine-Pilot.com.
It generated much positive discussion but also some confusion amongst the seafaring community who responded. There were requests for more information, evidence, and video presentations.
This my attempt to do just that. This is a summary of all scientific papers and articles that I could find about the ship’s pivot point. I have added links to any videos associated with the publications and have also included any useful diagrams or equations that the authors published to help explain their research.
I start with a quote from the abstract from Dr. Seong-Gi Seo’s 2011 paper on the ship’s pivot point subject. It explains why I have spent so much time on this article. I was once a mystified practitioner!
“The size of ships has increased notably over the recent decades. The size of harbours and ports has however not grown in proportion. As a result ship manoeuvring in harbours and ports has become more problematic…the pivot point concept can be useful in analysing slow ship manoeuvring [and now]… many practitioners now routinely plan confined manoeuvring using the [traditional] ‘pivot point’ concept. [However], the concept has been defined in a number of contradictory and inaccurate ways leading to confusion and mystification … many practitioners and trainers often rely on intuition to bridge the gap between reality and their flawed understanding of theory…[this paper] will correct definitions put forward and [apply it] to basic and ‘special’ ship manoeuvres.” Dr. Seong-Gi Seo, October 2011.
The ‘traditional’ pivot point theory
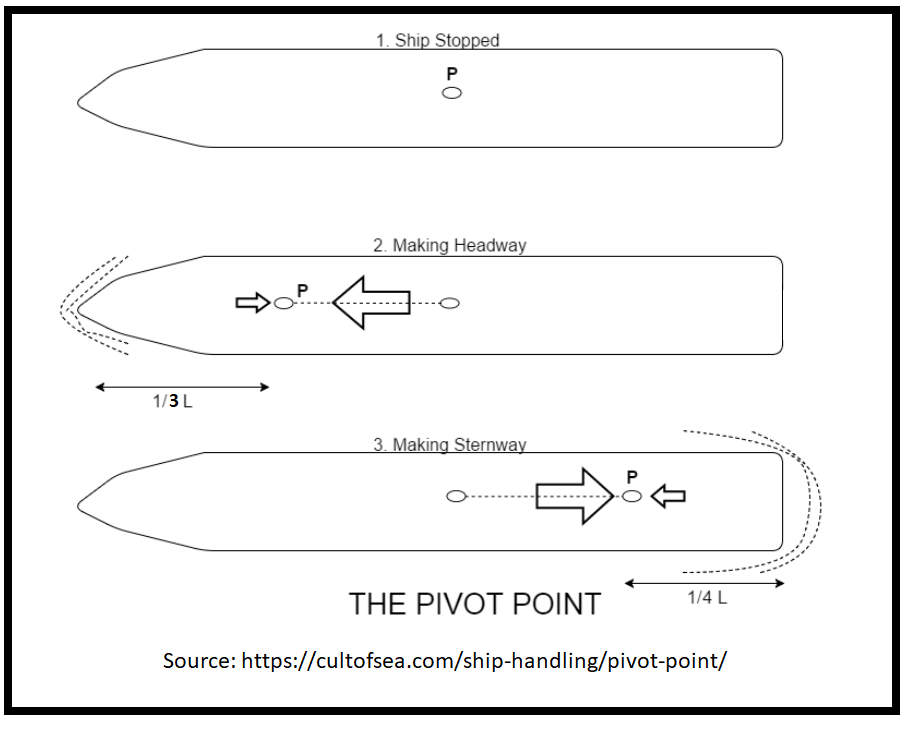
This is what I was taught when I was at nautical colleague as practical knowledge for ship handling and to pass exams. Even though there are other factors at play such as the shape of the hull and the resultant of external forces, as a rule of thumb the position of the pivot point on a ship floating on a even keel in calm water will be located as follows.
Rule (1)
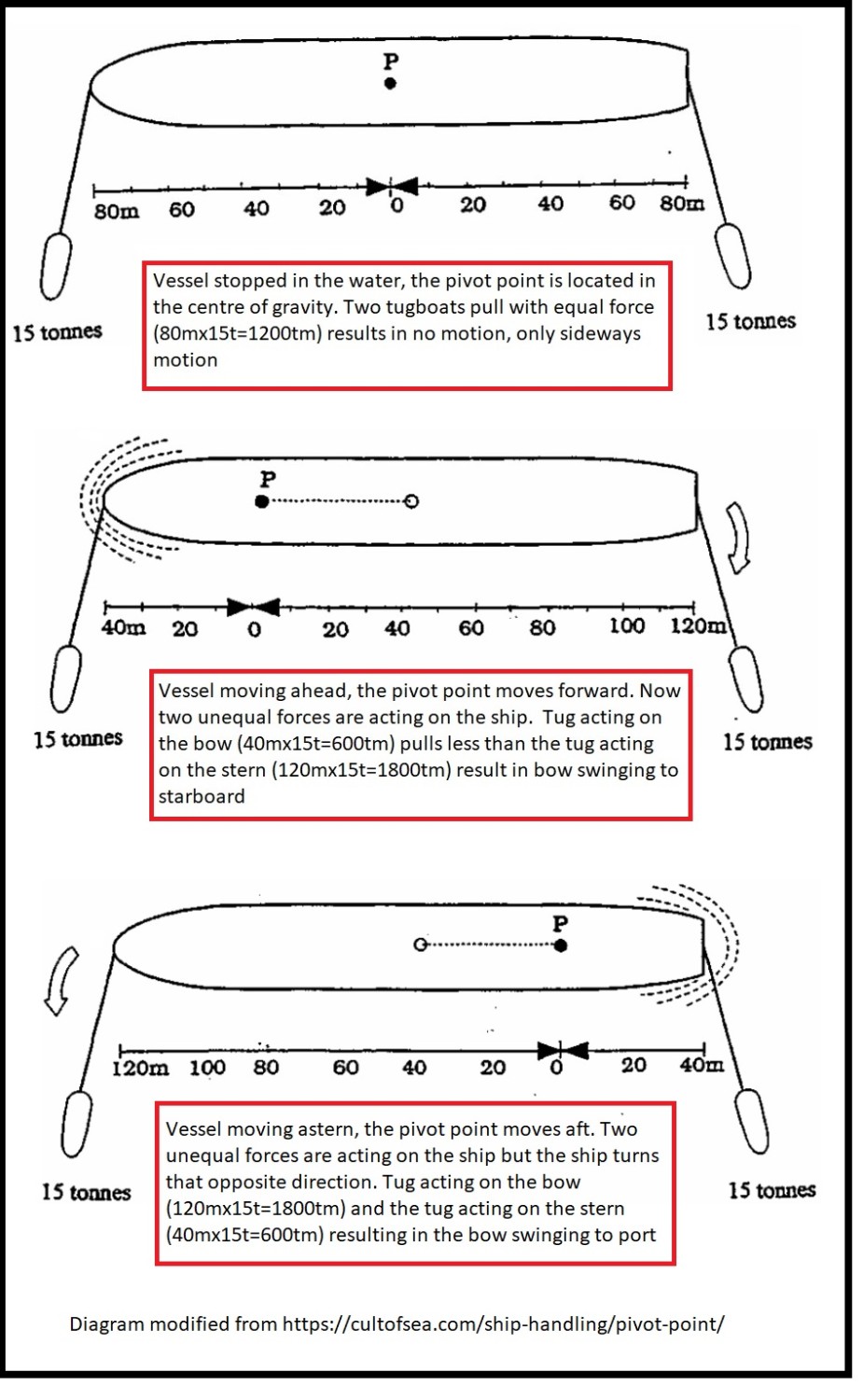
A ship stopped in the water; the pivot point is located at the centre of gravity of the ship.
A ship making headway; the pivot point moves forward with the ship’s motion, but friction of water creates a counter force resulting in the pivot point settling in a position approximately a 1/3rd of the ship’s length from the bow.
A ship making sternway; the pivot point moves aft with the ship’s motion, but friction of water creates a counter force resulting in the pivot point settling in a position approximately a 1/4th of the ship’s length from the stern.
Rule (2)
For ship handling all that is required is a consideration of Archimedes ‘Lever theory’. The pivot point is centre of rotation or the centre of leverage, any force applied at a significant distance away from the pivot acts to turn the vessel about the pivot point. A lever magnifies force.
Rule (3)
The pivot point is continuously shifting about as the ship moves and forces act upon it. For example, if a powerful force is applied at one end of the vessel, the pivot point will shift away from the force to the other end of the vessel. Examples of these forces include rudder force, propeller transverse thrust, bow or stern thrusters, tugboats, interactive forces, and external elements such as wind, tide and current.
The building argument against the ‘traditional’ pivot point theory
October 2008: Captain Hugues Cauvier (Maritime Pilot)
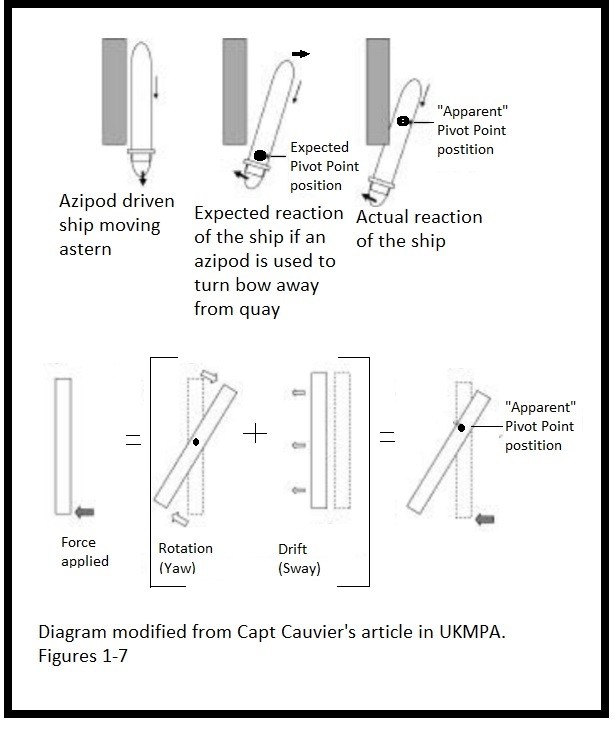
Captain Cauvier is a Canadian maritime pilot. He wrote an article for the United Kingdom Maritime Pilots’ Association (UKMPA) and it was published in October 2008. It was the result of 10 years of his own research. He coined the term “apparent pivot point” explaining that it seems like the ship is rotating about a fixed point because of a combination of two motions – rotation and drift (lateral motion) but is not the centre of rotation. Instead, he argues that the true centre of rotation is the centre of lateral resistance (COLR), a position on the hull where the total hydrodynamic pressure of water acts against the sideway (lateral) motion of the ship. He states the ‘traditional’ pivot point concept has its limitations and that it would be more useful for the mariner to evaluate the effect a sideways force on the rotation and drift (lateral movement) of a vessel as “more practical at all stages of ship handling than strictly dealing with the pivot point.”
To support his argument Captain Cauvier also downloaded a set of videos onto Youtube.
Here is the link www.youtube.com/playlist?list=PL341285F02E3F1692 If it doesn’t work then type in ‘Hugues Cauvier pivot point’ within the Youtube search bar.
To start he asks the reader to imagine an azipod driven vessel moving astern off a finger berth. If the ‘traditional’ pivot point theory is considered as soon as the ship’s stern and the pivot point is well clear of the corner of the berth then a 90 degree kick on the azipods towards the berth should cause the bow to swing to starboard. However, Captain Cauvier noticed that this does not happen and instead this manoeuvre pulls the ship sideways towards the berth and the pivot point looks like it is a 1/3rd of the ship’s length from the bow. See his video on Youtube. Therefore, Captain Cauvier states that the ‘traditional’ pivot point rule cannot be applied to all ship handling scenarios.
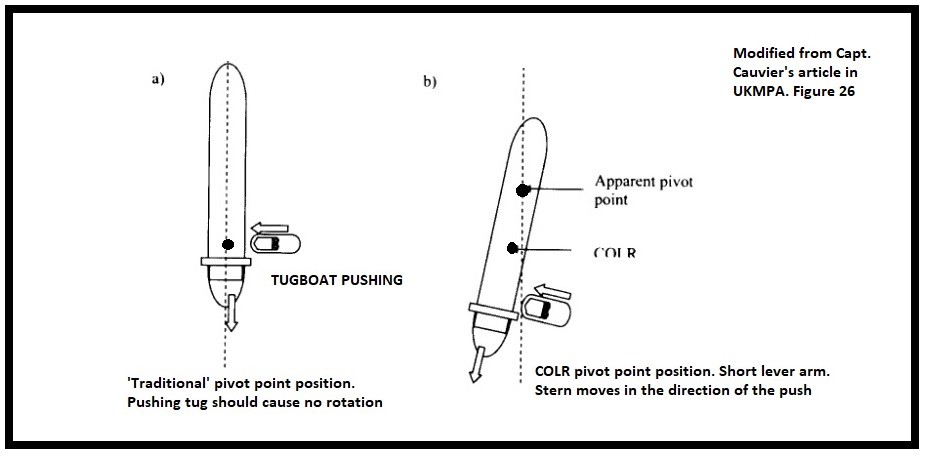
Another of his observations which cast further doubt about the ‘traditional’ understanding of the pivot point is when you request a tug to push just a little bit higher than the pivot point position. If the pivot point was the actual ‘pivot’ then you would expect the part of the ship forward of the pivot to move in the direction of the push and the part of the ship behind the pivot point to move in the opposite direction and the pivot point to experience no movement at all. However, his verification experiments show that this does not happen because the pivot point is not a fixed axis because the ship is afloat and any lateral (sideway) force will cause drift and the ‘pivot point’ will also be pushed sideways with the ship. If the pivot point is moving, it can not be the centre of rotation.
Captain Cauvier goes on to explain. A bar shaped body floats on friction free water. A lateral (sideways) force is applied at one extremity. The resulting motion is the combination of two parts – rotation about the centre of gravity (yaw) and a sideways bodily motion (sway aka drift). The combined effect of rotation and lateral motion have the appearance that there is a pivot point, a point that has no motion, and that appears as though it is positioned away from the acting lateral force. This is the apparent pivot point, but it is not the centre of leverage. It is not at the centre of gravity. It is not the result of any water friction because in this explanation there is none. It is not caused by any forward or backwards motion (surge) because there is none.
Apply this reasoning to a ship floating in the sea and it goes some way to explain what the mariner is ‘seeing’ when a force is applied to the side of the ship.
He continues. The closer to the centre of the ship the force is applied, the further away at the opposite end of the vessel the ‘apparent’ pivot point appears and can even be outside the ship’s physical shape. A small under keel clearance brings the ‘apparent’ pivot point closer to the centre of the ship. A heavier and wider vessel has an ‘apparent’ pivot point closer to the bow when moving ahead and turning. When a ship is turning and no longer has forces acting on it, the position of the ‘apparent’ pivot point follows the ‘traditional’ rules.
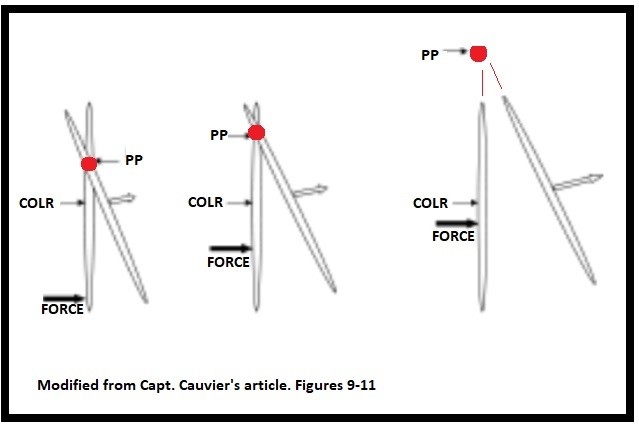
For the same change in angle (heading), the closer a force is applied to the centre of lateral resistance (COLR) the more that force can cause a ‘stronger’ drift (sideways) motion as well as rotation. This affects the position of the ‘apparent’ pivot point as shown in the diagram above. Note that the ‘apparent’ pivot point is not the centre of rotation, it is the centre of lateral resistance (COLR).
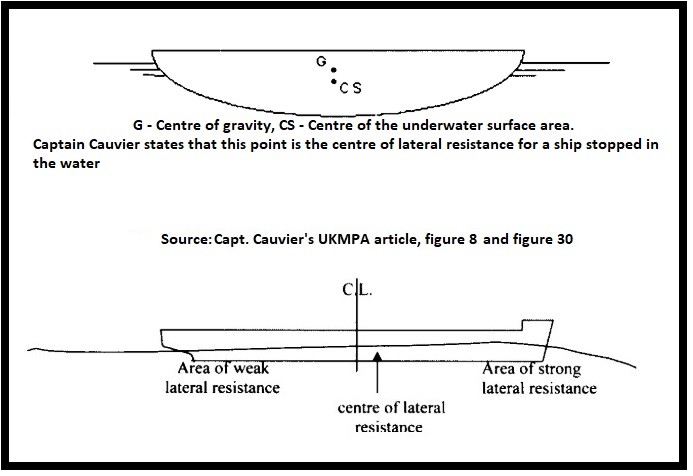
Where is the centre of rotation? Captain Cauvier argues that it is at the centre of lateral resistance (abbreviated as COLR). He calls it “the leaning point for arm levers”, the centre for turning moments. Basic hydrodynamic theory dictates that friction in a liquid will exert a force against a moving immersed solid object known as ‘resistance’. The centre of lateral resistance (COLR) therefore is the centre of pressure (total sum of hydrodynamic forces, resistance) acting against the sideway motion (lateral movement) of the hull. The force of the lateral resistance is dependent on hull form and under keel clearance (have a read of the article). Lateral forces acting at the centre of resistance cause no rotation about that point (as there is no lever, no moment) acting only to push the vessel sideway, whereas a lateral force acting away from the COLR will cause rotation.
Where is the centre of lateral resistance (COLR)? Starting at a position between the centre of gravity and the centre of the hull’s underwater surface area (roughly the ship’s length multiplied by its draft), and then shifting either ahead or astern of this position depending on whether the ship is trimmed by the bow or stern and also depending on whether the ship is moving ahead or astern.
Trimming a vessel influences the ship’s centre of underwater surface area. A ship trimmed by the stern would have a COLR located more aft and a ship trimmed by the bow would have a COLR located more forward. As the ship moves forward through the water a positive pressure field builds up around the bow and this increases lateral resistance in that area. This causes the COLR to shift forward. The COLR will shift towards the stern if the ship is moving astern as a positive pressure field builds around the stern of the vessel.
Verification observations / experiments
(Note: This is only a selection of two experiments for Captain Cauvier's article, please read the article for more explanations.)
Steering a ship going astern with a tug alongside
If the tug is positioned in the vicinity of the ‘traditional’ pivot point position (figure a) then when the tug pushes it should only cause lateral (sideways) motion because there is no lever arm to cause rotation. However, observation and experiment show that the ship does not respond this way because the stern moves in the direction of the pushing tug (figure b).
Reason: If the centre of lateral rotation (COLR) theory is applied then the COLR position would be positioned slightly aft of the ship’s centre of gravity because the ship is moving astern slowly. The tug would be pushing in a position aft of the COLR position and this short lever arm causes a small amount of rotation and sideways motion (drift). Also, the ‘apparent’ pivot point appears in a position that is approximately a 1/3rd of the ship’s length from the bow (reminded: the ‘apparent’ pivot point it is not the centre of rotation, as it is around the COLR).
Small scale ship models experiment
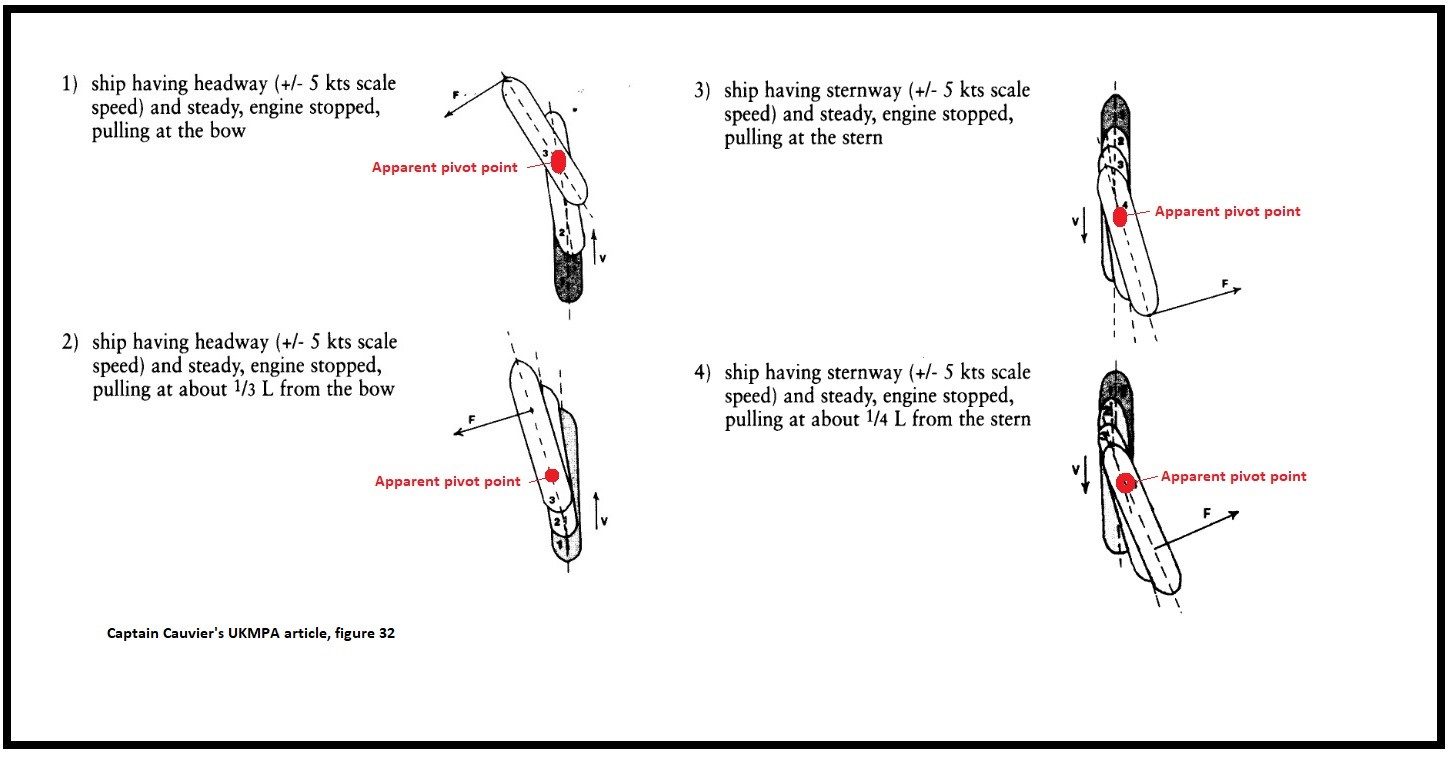
Captain Cauvier experimented on a scaled down bulk carrier with an even keel moving ahead and then astern at slow speed. To apply effective lateral force, he used a towing line pulled by hand so that he could avoid any ship-tug interaction interference.
When lateral force was applied right ahead and then right astern (figures 1 and 3) the ‘apparent’ pivot point appeared at the opposite end to where the ‘traditional’ pivot point concept dictated.
When lateral force was applied at a position a 1/3rd of the ship’s length from the bow when the model was moving ahead and the at a position a 1/4th of the ship’s length from the stern when the model was moving astern (figures 2 and 4) what resulted was a small amount of rotation and sideways motion indicating that a lever arm was present. If the ‘traditional’ pivot point concept was correct, then applying force at these positions would have caused no rotation and only sideways motion as the turning moment lever in theory would have been zero.
Thereby, this experiment demonstrated “again clearly the weakness of traditional theory”.
(Note: Captain Hugues Cauvier also describes a new and interesting theory about 'the ship generated sideways current' in the same article and how it effects ship handling. It is also worth a read.)
August 2011: Dr. Seong-Gi Seo (Hydrodynamics researcher and lecturer)t
3 years after Captain Cauvier’s article, Dr Seo writes an article that is published in the Nautical Institute magazine Seaways. The article adds weight to Captain Cauvier’s argument that the ‘traditional’ pivot point is only the ‘apparent’ centre of rotation but Dr. Seo states that rotation (yaw) occurs at a central point at mid-ship. There is no mention of the centre of lateral resistance (COLR) theory from Captain Cauvier’s article other than a nod at the end (perhaps) that pivot point of the ship responds to “changing hydrodynamic surroundings”.
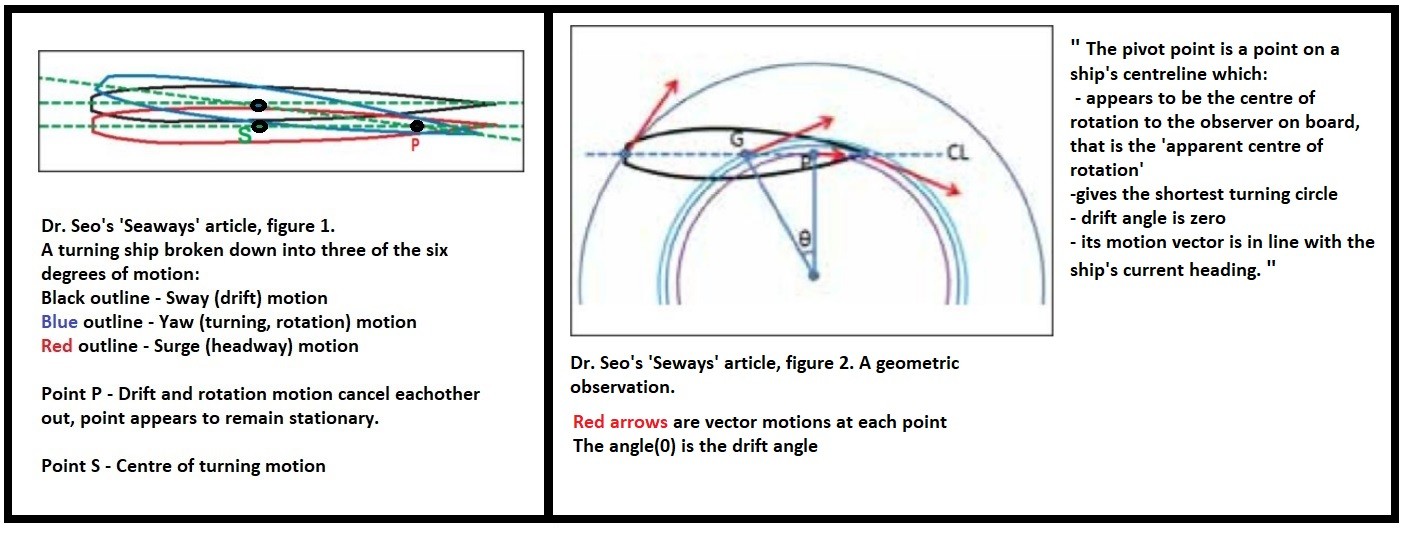
‘A trick of the eye’: Dr. Seo writes that the ‘apparent’ pivot point is the resultant of a combination of surge (forward or astern motion), surge (drift, sideways lateral motion) and yaw (rotation) occurring concurrently. He goes on to explain that as drift and turn motion occur simultaneously a unique point appears to have no rotation (Point P) but is the two motions cancelling each other out. With surge motion added it appears that this unique point (Point P) has only forward motion. Therefore, it is an illusion (or misleading impression or a ‘trick of the eye’) that the ship is pivoting about this point.
Dr. Seo establishes the following equations that show the relation between sway speed, yaw speed and the position of the pivot point:
V + (Xp x r) = 0 thereby... Xp= -V/r
V (meters/second) is the sway speed of Point S , Xp (meters) is the distance Point P to Point S, r (rad/second) is the yaw speed.
Therefore, if you know the sway speed and the yaw speed you can determine the position of Point P and Point S. If sway speed or raw speed increase or decrease they will influence the position of Point P.
Dr. Seo explains that if rotation motion (yaw , r ) precedes the drift motion (sway, V ) the pivot point (Point P) would first appear at Point S and then gradually shift to Point P as equilibrium establishes (highlighting a new idea that the pivot point does not move instantly). The example given was the ship’s initial reaction to a turning rudder from a midships position. If the reverse happens and sway motion precedes the rotation motion, then the pivot point first appears at infinity and then quickly establishes itself at Point P. For example, every time the rudder changes from port to starboard or vice versa, the ship will have a short period of zero yaw speed while still swaying.
Demonstrations of ship motion.
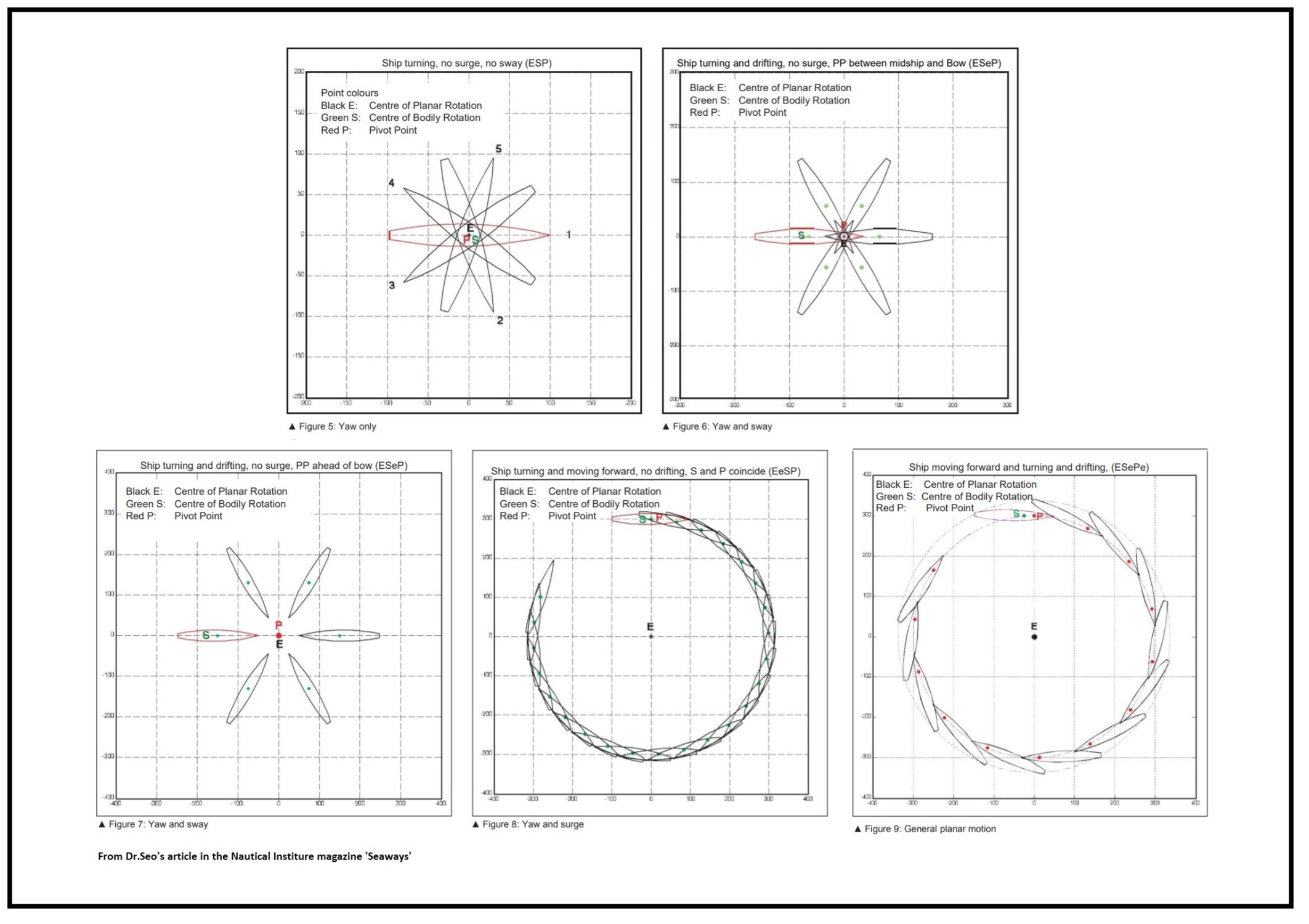
Dr. Seo continues with a series of diagrams that show the ship’s behaviour with yaw in isolation and then in combination with sway and then surge.
Figure 5 – Yaw only. The ship turning about its own centre of rotation (Point S). For example, bow and stern thrusters (or tug boats) operating in opposite directions
Figure 6 – Yaw and sway only. Pivot P is between Point S and the bow, the centre of rotation and Point P coincide.
Figure 7 – Yaw and sway only, but pivot point is ahead of the bow (such as when using a stern thruster or tugboat only).
Dr. Seo explains that the pivot point can be ahead of the ship if “the drift angle of Point S, θ >sin-1 (L/2R); and the turning circle radius R> (L/2tanθ) and the ship circles with a curvature less than (2tanθ/L)” or Xp= -V/r, where -V >0.5Lr (Where L is the ship’s length, R is the turning circle radius, θ is the drift angle / yaw angle, 1 is the drift angle of S when P is at the bow. Personally, I don’t understand the maths here so I have just taken his word for it)
Figure 8 – Yaw and surge only (stern prevented from swinging out). Demonstrates that this manoeuvre could be useful for turning in restricted waters.
Figure 9 – Yaw, sway and surge. “The amount of [stern] swing out is directly related to the position of the pivot point.”
The article summarises at the end that the pivot point is not the actual centre of rotation and is only the ‘apparent’ centre of rotation; the pivot point does not move instantly but instead gradually and responding to hydrodynamics; the pivot point is not dependant on surge motion (headway or sternway).
However, in regards to the complex calculations used in ship manoeuvring simulation software which computerise sway speed and yaw speed to calculate the pivot point location, Dr Seo considers that it would still be useful to ship handlers to include the instantaneous pivot point location on a display monitor.
Dr. Seo explains that the ‘traditional’ pivot point concept is useful to help visualise the movement of a ship (such as visualising surge and sway) but it has limited applications for ship manoeuvring in confirmed areas.
October 2011: Dr. Seong-Gi Seo and M. Mishu (Hydrodynamics researcher and lecturer)
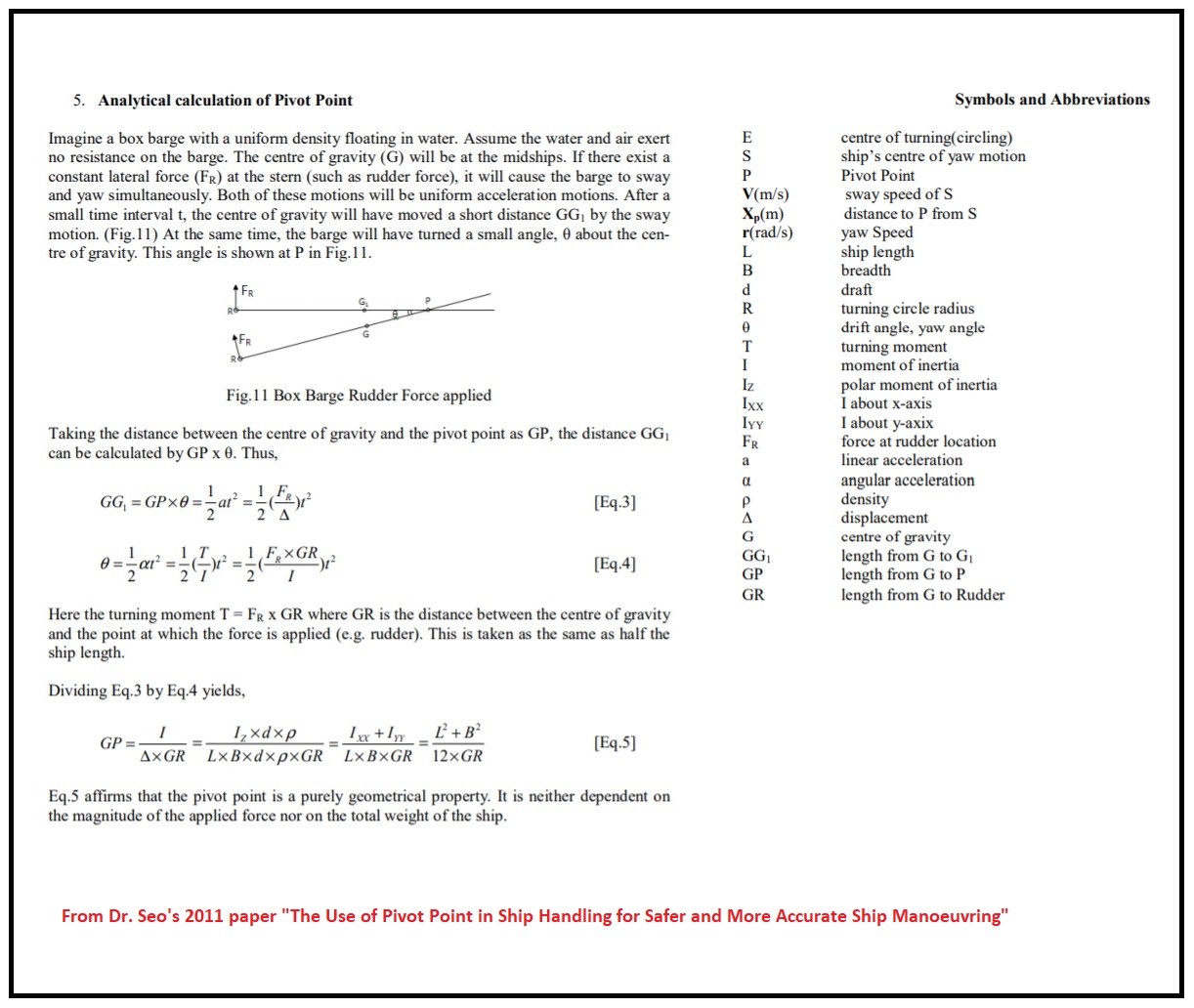
A few months later, Dr. Seo publishes the scientific paper that was the inspiration of his ‘Seaways’ article. It contained all the explanation and diagrams from his article and at the end offered more mathematical equations for the calculation of the pivot point position. I do like the abstract though which I inserted at the very beginning of this article.
For those of you who wanted more mathematical proof here it is! However, Dr. Seo does state that the below was for the "idealised case" and that in reality there will be water and air resistance, the ship will have added mass and maybe trimmed and the viscosity of water will change flow and pressure fields.
October 2011: Captain Dr. Paul Butusina (Hydrodynamics researcher and ship captain)
Captain Butusina wrote a scientific paper on the pivot point with Dr. Dumitru Dina as part of his PhD in hydrodynamics. He also wrote an article about his paper for the UKMPA ‘Pilot’ magazine. The paper and article supported both Captain Cauvier and Dr. Seo’s work and provides further explanation on water resistance.
Captain Butusina explains that for a ship stopped in the water you will find a point situated near the mid length where a tug pushing with a force (F) will cause the forward and aft extremities of the ship to move at the same speed. This is because the force is applied at the same point as the water-resistant force (R), the Centre of Water (Lateral) Resistance (CLR). Because the lever of F-R is zero, the ship will move sideways but will not rotate.
If the force is moved just aft of the CLR then there will be a small lever arm and the ship will rotate and move sideways, and the pivot point will appear to be ahead of the ship and outside the ship’s shape. Moving the position of the force changes the position of the pivot point as shown in the diagrams below. For further demonstration of the CLR if opposite and equal forces are now applied at each end of the ship the ship will rotate about a point which will be the CLR.
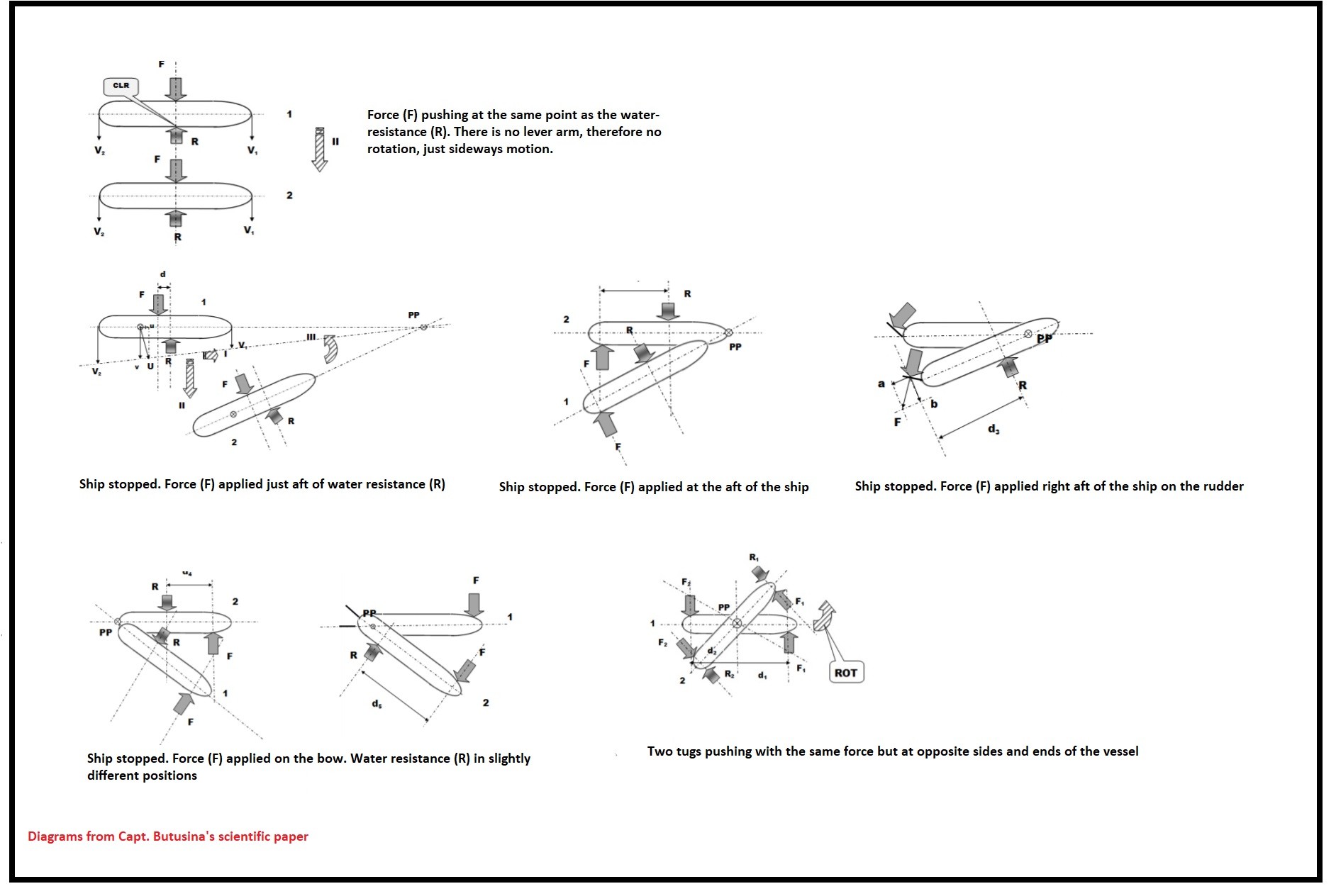
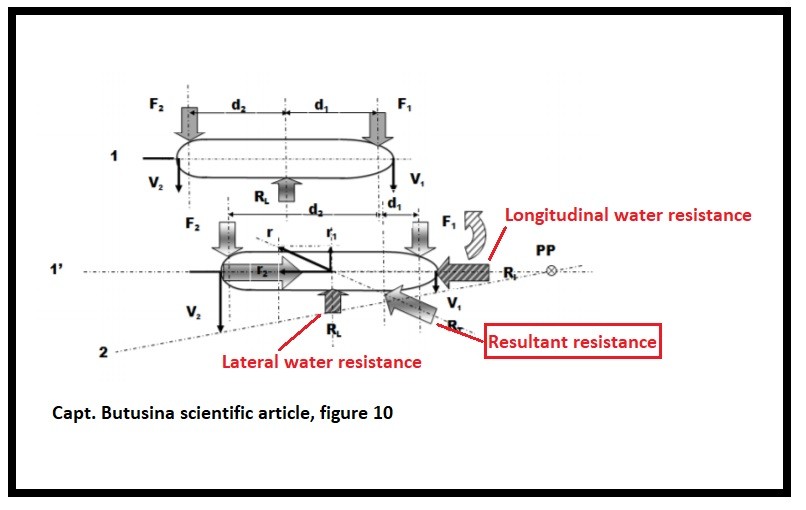
Now with the ship moving ahead with two tugs pushing equidistant from the Centre of (Lateral) Resistance. The vessel will move ahead and move sideways. The resultant force from lateral water-resistance and longitudinal water-resistance force will act on the starboard bow. The ship’s 'apparent' pivot point will move forward in the direction of the movement causing the levers of the tug pushing force to change. This would cause the ship’s bow to swing to port and the stern tug would have a bigger lever than the bow tug.
July 2012: Professor Tae-Gweon Jeong (Nautical science researcher and lecturer)
The ‘new’ pivot point theory starts to build traction in the scientific community. Professor Jeong from the Korea Maritime University wrote a short two page summary of Captain Cauvier’s article and was convinced that the ‘traditional’ pivot point was “not real” and not the centre of leverage. He suggests that the COLR theory is adopted by ship handlers.
December 2012: J.E. Carreno (Hydrodynamics Researcher)
Dr. Carreno wrote a scientific paper on the shallow water effects on the ship’s pivot point and discusses a lot of the theory in Captain Cauvier’s article. The paper also expands on Dr. Seo’s equation.
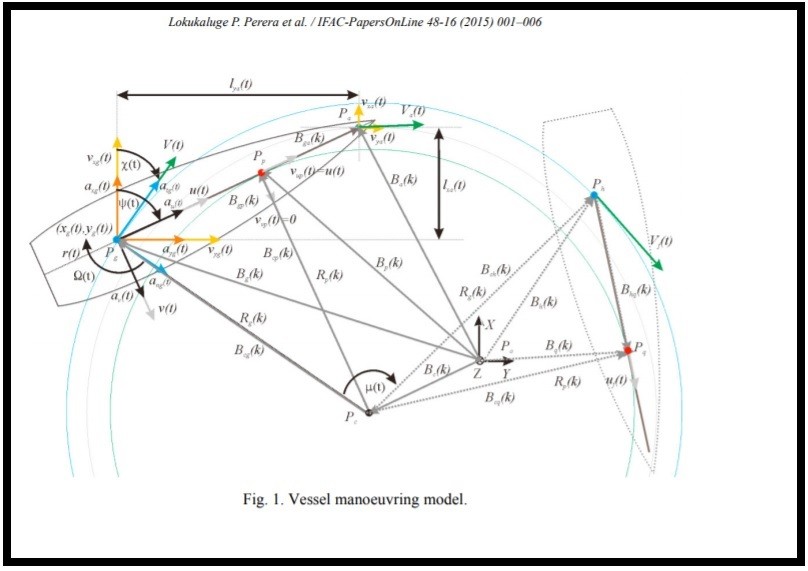
January 2015: Prasad Perera (Hydrodynamics Researcher)
The paper develops the science of calculating the position of the ‘pivot point’ so that the algorithm can be used in ship movement prediction on integrated bridge systems. The paper proposes to “include various sensors for measuring the vessel position, heading, yaw rate and surge and sway acceleration components … [to] be an important part of future integrated bridge systems.” The simulated model of a turning ship looks like this diagram below. The paper acknowledges a lot of the work by Dr. Seo
December 2016: Dr Seong-Gi Seo (Hydrodynamics researcher and lecturer)
Dr. Seo published an updated paper on his work from 2011. He expands on explanation that the pivot point seen by the ship handler is an illusion therefore only the ‘apparent’ pivot point and not the actual centre of the ship’s rotation. Reasserts the theory that the pivot point is independent of surge motion of the ship and does not move towards the direction of the ship’s ahead or astern motion and does not move instantly but gradually.
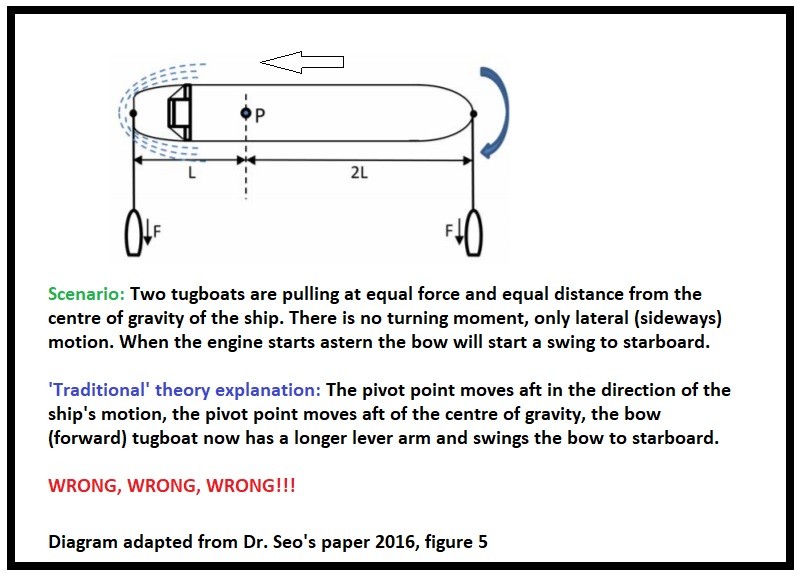
He sends another nod to Captain Cauvier when he writes about the above scenario … “The account is mistaken in two aspects. One is that the pivot point is treated as a physical entity (as the fulcrum) … the other that the pivot point is treated as the cause. The correct explanation is that when the ship starts to move astern, the centre of lateral resistance moves sternwards from midship. Thus the reactive hydrodynamic forces providing an extra turning force about the centre of gravity. The tugs are pulling the ship to starboard. The starboard sway causing the pivot point to appear between the centre of gravity and the stern as the result.”
The paper also formulates an updated equation that shows that if sway speed and yaw speed are known then the position of the pivot point (even though it would be imaginary) can be calculated as a distance from the centre of mass (GP):
V + (GP x r) = 0
V is sway speed of G in meters per second, G is the centre of gravity, P is the Pivot Point, GP is the distance to P from G in meters and r is the yaw speed in radians per second.
The paper also explains again the results of a series of verification experiments by using the ‘updated’ pivot point understanding.
January 2018: A. Nedelcu et al. (Hydrodynamic research team)
Similar to the January 2015 paper of Prasad Perera, it uses a complex mathematical model to predict the position of the ‘apparent’ pivot point for ship manoeuvring simulation and future position prediction in an idealised condition with hydrodynamic influence.
July 2020: Doctor Knud Benedict (Ship Manourving Simulation researcher)
Dr. Benedict is a researcher in ship simulation modelling and ship manoeuvring prediction. He filmed two Youtube videos about the ship's pivot point in response to my previous article on the ship's pivot point. He makes some very useful points and so I thought it would be useful to refer you to his Youtube page.
www.youtube.com/channel/UCR7yLtA5eqRUHNfQLXfgueA/videos
If this link doesn't work type in "ISSIMS GmbH & Institute: Innovative Simulation" into the Youtube search bar ... and if you type Knud Benedict into the Youtube search bar you will also see of a video of Knud singing and playing guitar! He is multi talented it seems ;-)
References (in order refered to in the article)
"The Pivot Point" https://cultofsea.com/ship-handling/pivot-point/
Capt. H. Cauvier “The Pivot Point” – Article published in the United Kingdom Maritime Pilots’ Association “The Pilot”, October 2008, No.295
Dr. Seo "Rethinking the pivot point" - Article published in the Nautical Institute "Seaways" magazine, August 2011 http://mannedmodels.com/RethinkingPivotPoint.pdf
Dr. Seong-Gi Seo and Dr. M Mishu – “The Use of Pivot Point in Ship Handling for Safer and More Accurate Ship Manoeuvring” – Proceedings of IMLA, 1 October 2011, 1 (29), pp. 271-280 – https://ssudl.solent.ac.uk/id/eprint/2366/1/IMLA_Article(final).pdf
Capt. P. Butusina “The Pivot Point Revisited” – Article published in the United Kingdom Maritime Pilots’ Association “The Pilot”, Autumn 2011, No.306
Capt. P. Butusina and D. Dinu - "Ship' Pivot Point in Current and Swell" - PhD research paper www.pilotmag.co.uk/wp-content/uploads/2012/01/Pivot-point-final.pdf)
T-G Jeong - "A study on Comparison between Center of Lateral Resistance and Pivot Point being Used in Handling Ships at the Present time" (available www.koreascience.or.kr/article/CFKO201224542272818.page)
J.E. Carreno et al. "A study of shallow water's effect on a ship's pivot point" - Ing.Invesig. Vol.32 no.3 Bogota (available www.scielo.org.co/scielo.php?pid=S0120-56092012000300006&script=sci_arttext&tlng=pt)
P. Perara et al. "Ship Maneuvring Prediction under Navigation Vector Multiplication based Pivot Point Estimation" (available www.sciencedirect.com/science/article/pii/S2405896315021400)
Dr. Seong-Gi Seo “Safer and More Efficient Ship Handling with the Pivot Point Concept” - International journal of Marine Navigation and Safety of Sea Transportation in December 2016 (Volume 10, Number 4)
A. Nedelcu et al. "Ship Manoeuvring Prediction based on Pivot Point Estimation" SBNA Paper, Open Access (available www.anmb.ro/buletinstiintific/buletine/2018_Issue2/03_NTM/10.pdf)
I originally wrote a short opinion piece article entitled “Scientific Fact: The ‘Traditional’ Understanding of the Ship’s Pivot Point is Wrong! What You Are Seeing is a ‘Trick of the Eye’” and it is still available to view on Marine-Pilot.com.
It generated much positive discussion but also some confusion amongst the seafaring community who responded. There were requests for more information, evidence, and video presentations.
This my attempt to do just that. This is a summary of all scientific papers and articles that I could find about the ship’s pivot point. I have added links to any videos associated with the publications and have also included any useful diagrams or equations that the authors published to help explain their research.
I start with a quote from the abstract from Dr. Seong-Gi Seo’s 2011 paper on the ship’s pivot point subject. It explains why I have spent so much time on this article. I was once a mystified practitioner!
“The size of ships has increased notably over the recent decades. The size of harbours and ports has however not grown in proportion. As a result ship manoeuvring in harbours and ports has become more problematic…the pivot point concept can be useful in analysing slow ship manoeuvring [and now]… many practitioners now routinely plan confined manoeuvring using the [traditional] ‘pivot point’ concept. [However], the concept has been defined in a number of contradictory and inaccurate ways leading to confusion and mystification … many practitioners and trainers often rely on intuition to bridge the gap between reality and their flawed understanding of theory…[this paper] will correct definitions put forward and [apply it] to basic and ‘special’ ship manoeuvres.” Dr. Seong-Gi Seo, October 2011.
The ‘traditional’ pivot point theory
This is what I was taught when I was at nautical colleague as practical knowledge for ship handling and to pass exams. Even though there are other factors at play such as the shape of the hull and the resultant of external forces, as a rule of thumb the position of the pivot point on a ship floating on a even keel in calm water will be located as follows.
Rule (1)
A ship stopped in the water; the pivot point is located at the centre of gravity of the ship.
A ship making headway; the pivot point moves forward with the ship’s motion, but friction of water creates a counter force resulting in the pivot point settling in a position approximately a 1/3rd of the ship’s length from the bow.
A ship making sternway; the pivot point moves aft with the ship’s motion, but friction of water creates a counter force resulting in the pivot point settling in a position approximately a 1/4th of the ship’s length from the stern.
Rule (2)
For ship handling all that is required is a consideration of Archimedes ‘Lever theory’. The pivot point is centre of rotation or the centre of leverage, any force applied at a significant distance away from the pivot acts to turn the vessel about the pivot point. A lever magnifies force.
Rule (3)
The pivot point is continuously shifting about as the ship moves and forces act upon it. For example, if a powerful force is applied at one end of the vessel, the pivot point will shift away from the force to the other end of the vessel. Examples of these forces include rudder force, propeller transverse thrust, bow or stern thrusters, tugboats, interactive forces, and external elements such as wind, tide and current.
The building argument against the ‘traditional’ pivot point theory
October 2008: Captain Hugues Cauvier (Maritime Pilot)
Captain Cauvier is a Canadian maritime pilot. He wrote an article for the United Kingdom Maritime Pilots’ Association (UKMPA) and it was published in October 2008. It was the result of 10 years of his own research. He coined the term “apparent pivot point” explaining that it seems like the ship is rotating about a fixed point because of a combination of two motions – rotation and drift (lateral motion) but is not the centre of rotation. Instead, he argues that the true centre of rotation is the centre of lateral resistance (COLR), a position on the hull where the total hydrodynamic pressure of water acts against the sideway (lateral) motion of the ship. He states the ‘traditional’ pivot point concept has its limitations and that it would be more useful for the mariner to evaluate the effect a sideways force on the rotation and drift (lateral movement) of a vessel as “more practical at all stages of ship handling than strictly dealing with the pivot point.”
To support his argument Captain Cauvier also downloaded a set of videos onto Youtube.
Here is the link www.youtube.com/playlist?list=PL341285F02E3F1692 If it doesn’t work then type in ‘Hugues Cauvier pivot point’ within the Youtube search bar.
To start he asks the reader to imagine an azipod driven vessel moving astern off a finger berth. If the ‘traditional’ pivot point theory is considered as soon as the ship’s stern and the pivot point is well clear of the corner of the berth then a 90 degree kick on the azipods towards the berth should cause the bow to swing to starboard. However, Captain Cauvier noticed that this does not happen and instead this manoeuvre pulls the ship sideways towards the berth and the pivot point looks like it is a 1/3rd of the ship’s length from the bow. See his video on Youtube. Therefore, Captain Cauvier states that the ‘traditional’ pivot point rule cannot be applied to all ship handling scenarios.
Another of his observations which cast further doubt about the ‘traditional’ understanding of the pivot point is when you request a tug to push just a little bit higher than the pivot point position. If the pivot point was the actual ‘pivot’ then you would expect the part of the ship forward of the pivot to move in the direction of the push and the part of the ship behind the pivot point to move in the opposite direction and the pivot point to experience no movement at all. However, his verification experiments show that this does not happen because the pivot point is not a fixed axis because the ship is afloat and any lateral (sideway) force will cause drift and the ‘pivot point’ will also be pushed sideways with the ship. If the pivot point is moving, it can not be the centre of rotation.
Captain Cauvier goes on to explain. A bar shaped body floats on friction free water. A lateral (sideways) force is applied at one extremity. The resulting motion is the combination of two parts – rotation about the centre of gravity (yaw) and a sideways bodily motion (sway aka drift). The combined effect of rotation and lateral motion have the appearance that there is a pivot point, a point that has no motion, and that appears as though it is positioned away from the acting lateral force. This is the apparent pivot point, but it is not the centre of leverage. It is not at the centre of gravity. It is not the result of any water friction because in this explanation there is none. It is not caused by any forward or backwards motion (surge) because there is none.
Apply this reasoning to a ship floating in the sea and it goes some way to explain what the mariner is ‘seeing’ when a force is applied to the side of the ship.
He continues. The closer to the centre of the ship the force is applied, the further away at the opposite end of the vessel the ‘apparent’ pivot point appears and can even be outside the ship’s physical shape. A small under keel clearance brings the ‘apparent’ pivot point closer to the centre of the ship. A heavier and wider vessel has an ‘apparent’ pivot point closer to the bow when moving ahead and turning. When a ship is turning and no longer has forces acting on it, the position of the ‘apparent’ pivot point follows the ‘traditional’ rules.
For the same change in angle (heading), the closer a force is applied to the centre of lateral resistance (COLR) the more that force can cause a ‘stronger’ drift (sideways) motion as well as rotation. This affects the position of the ‘apparent’ pivot point as shown in the diagram above. Note that the ‘apparent’ pivot point is not the centre of rotation, it is the centre of lateral resistance (COLR).
Where is the centre of rotation? Captain Cauvier argues that it is at the centre of lateral resistance (abbreviated as COLR). He calls it “the leaning point for arm levers”, the centre for turning moments. Basic hydrodynamic theory dictates that friction in a liquid will exert a force against a moving immersed solid object known as ‘resistance’. The centre of lateral resistance (COLR) therefore is the centre of pressure (total sum of hydrodynamic forces, resistance) acting against the sideway motion (lateral movement) of the hull. The force of the lateral resistance is dependent on hull form and under keel clearance (have a read of the article). Lateral forces acting at the centre of resistance cause no rotation about that point (as there is no lever, no moment) acting only to push the vessel sideway, whereas a lateral force acting away from the COLR will cause rotation.
Where is the centre of lateral resistance (COLR)? Starting at a position between the centre of gravity and the centre of the hull’s underwater surface area (roughly the ship’s length multiplied by its draft), and then shifting either ahead or astern of this position depending on whether the ship is trimmed by the bow or stern and also depending on whether the ship is moving ahead or astern.
Trimming a vessel influences the ship’s centre of underwater surface area. A ship trimmed by the stern would have a COLR located more aft and a ship trimmed by the bow would have a COLR located more forward. As the ship moves forward through the water a positive pressure field builds up around the bow and this increases lateral resistance in that area. This causes the COLR to shift forward. The COLR will shift towards the stern if the ship is moving astern as a positive pressure field builds around the stern of the vessel.
Verification observations / experiments
(Note: This is only a selection of two experiments for Captain Cauvier's article, please read the article for more explanations.)
Steering a ship going astern with a tug alongside
If the tug is positioned in the vicinity of the ‘traditional’ pivot point position (figure a) then when the tug pushes it should only cause lateral (sideways) motion because there is no lever arm to cause rotation. However, observation and experiment show that the ship does not respond this way because the stern moves in the direction of the pushing tug (figure b).
Reason: If the centre of lateral rotation (COLR) theory is applied then the COLR position would be positioned slightly aft of the ship’s centre of gravity because the ship is moving astern slowly. The tug would be pushing in a position aft of the COLR position and this short lever arm causes a small amount of rotation and sideways motion (drift). Also, the ‘apparent’ pivot point appears in a position that is approximately a 1/3rd of the ship’s length from the bow (reminded: the ‘apparent’ pivot point it is not the centre of rotation, as it is around the COLR).
Small scale ship models experiment
Captain Cauvier experimented on a scaled down bulk carrier with an even keel moving ahead and then astern at slow speed. To apply effective lateral force, he used a towing line pulled by hand so that he could avoid any ship-tug interaction interference.
When lateral force was applied right ahead and then right astern (figures 1 and 3) the ‘apparent’ pivot point appeared at the opposite end to where the ‘traditional’ pivot point concept dictated.
When lateral force was applied at a position a 1/3rd of the ship’s length from the bow when the model was moving ahead and the at a position a 1/4th of the ship’s length from the stern when the model was moving astern (figures 2 and 4) what resulted was a small amount of rotation and sideways motion indicating that a lever arm was present. If the ‘traditional’ pivot point concept was correct, then applying force at these positions would have caused no rotation and only sideways motion as the turning moment lever in theory would have been zero.
Thereby, this experiment demonstrated “again clearly the weakness of traditional theory”.
(Note: Captain Hugues Cauvier also describes a new and interesting theory about 'the ship generated sideways current' in the same article and how it effects ship handling. It is also worth a read.)
August 2011: Dr. Seong-Gi Seo (Hydrodynamics researcher and lecturer)t
3 years after Captain Cauvier’s article, Dr Seo writes an article that is published in the Nautical Institute magazine Seaways. The article adds weight to Captain Cauvier’s argument that the ‘traditional’ pivot point is only the ‘apparent’ centre of rotation but Dr. Seo states that rotation (yaw) occurs at a central point at mid-ship. There is no mention of the centre of lateral resistance (COLR) theory from Captain Cauvier’s article other than a nod at the end (perhaps) that pivot point of the ship responds to “changing hydrodynamic surroundings”.
‘A trick of the eye’: Dr. Seo writes that the ‘apparent’ pivot point is the resultant of a combination of surge (forward or astern motion), surge (drift, sideways lateral motion) and yaw (rotation) occurring concurrently. He goes on to explain that as drift and turn motion occur simultaneously a unique point appears to have no rotation (Point P) but is the two motions cancelling each other out. With surge motion added it appears that this unique point (Point P) has only forward motion. Therefore, it is an illusion (or misleading impression or a ‘trick of the eye’) that the ship is pivoting about this point.
Dr. Seo establishes the following equations that show the relation between sway speed, yaw speed and the position of the pivot point:
V + (Xp x r) = 0 thereby... Xp= -V/r
V (meters/second) is the sway speed of Point S , Xp (meters) is the distance Point P to Point S, r (rad/second) is the yaw speed.
Therefore, if you know the sway speed and the yaw speed you can determine the position of Point P and Point S. If sway speed or raw speed increase or decrease they will influence the position of Point P.
Dr. Seo explains that if rotation motion (yaw , r ) precedes the drift motion (sway, V ) the pivot point (Point P) would first appear at Point S and then gradually shift to Point P as equilibrium establishes (highlighting a new idea that the pivot point does not move instantly). The example given was the ship’s initial reaction to a turning rudder from a midships position. If the reverse happens and sway motion precedes the rotation motion, then the pivot point first appears at infinity and then quickly establishes itself at Point P. For example, every time the rudder changes from port to starboard or vice versa, the ship will have a short period of zero yaw speed while still swaying.
Demonstrations of ship motion.
Dr. Seo continues with a series of diagrams that show the ship’s behaviour with yaw in isolation and then in combination with sway and then surge.
Figure 5 – Yaw only. The ship turning about its own centre of rotation (Point S). For example, bow and stern thrusters (or tug boats) operating in opposite directions
Figure 6 – Yaw and sway only. Pivot P is between Point S and the bow, the centre of rotation and Point P coincide.
Figure 7 – Yaw and sway only, but pivot point is ahead of the bow (such as when using a stern thruster or tugboat only).
Dr. Seo explains that the pivot point can be ahead of the ship if “the drift angle of Point S, θ >sin-1 (L/2R); and the turning circle radius R> (L/2tanθ) and the ship circles with a curvature less than (2tanθ/L)” or Xp= -V/r, where -V >0.5Lr (Where L is the ship’s length, R is the turning circle radius, θ is the drift angle / yaw angle, 1 is the drift angle of S when P is at the bow. Personally, I don’t understand the maths here so I have just taken his word for it)
Figure 8 – Yaw and surge only (stern prevented from swinging out). Demonstrates that this manoeuvre could be useful for turning in restricted waters.
Figure 9 – Yaw, sway and surge. “The amount of [stern] swing out is directly related to the position of the pivot point.”
The article summarises at the end that the pivot point is not the actual centre of rotation and is only the ‘apparent’ centre of rotation; the pivot point does not move instantly but instead gradually and responding to hydrodynamics; the pivot point is not dependant on surge motion (headway or sternway).
However, in regards to the complex calculations used in ship manoeuvring simulation software which computerise sway speed and yaw speed to calculate the pivot point location, Dr Seo considers that it would still be useful to ship handlers to include the instantaneous pivot point location on a display monitor.
Dr. Seo explains that the ‘traditional’ pivot point concept is useful to help visualise the movement of a ship (such as visualising surge and sway) but it has limited applications for ship manoeuvring in confirmed areas.
October 2011: Dr. Seong-Gi Seo and M. Mishu (Hydrodynamics researcher and lecturer)
A few months later, Dr. Seo publishes the scientific paper that was the inspiration of his ‘Seaways’ article. It contained all the explanation and diagrams from his article and at the end offered more mathematical equations for the calculation of the pivot point position. I do like the abstract though which I inserted at the very beginning of this article.
For those of you who wanted more mathematical proof here it is! However, Dr. Seo does state that the below was for the "idealised case" and that in reality there will be water and air resistance, the ship will have added mass and maybe trimmed and the viscosity of water will change flow and pressure fields.
October 2011: Captain Dr. Paul Butusina (Hydrodynamics researcher and ship captain)
Captain Butusina wrote a scientific paper on the pivot point with Dr. Dumitru Dina as part of his PhD in hydrodynamics. He also wrote an article about his paper for the UKMPA ‘Pilot’ magazine. The paper and article supported both Captain Cauvier and Dr. Seo’s work and provides further explanation on water resistance.
Captain Butusina explains that for a ship stopped in the water you will find a point situated near the mid length where a tug pushing with a force (F) will cause the forward and aft extremities of the ship to move at the same speed. This is because the force is applied at the same point as the water-resistant force (R), the Centre of Water (Lateral) Resistance (CLR). Because the lever of F-R is zero, the ship will move sideways but will not rotate.
If the force is moved just aft of the CLR then there will be a small lever arm and the ship will rotate and move sideways, and the pivot point will appear to be ahead of the ship and outside the ship’s shape. Moving the position of the force changes the position of the pivot point as shown in the diagrams below. For further demonstration of the CLR if opposite and equal forces are now applied at each end of the ship the ship will rotate about a point which will be the CLR.
Now with the ship moving ahead with two tugs pushing equidistant from the Centre of (Lateral) Resistance. The vessel will move ahead and move sideways. The resultant force from lateral water-resistance and longitudinal water-resistance force will act on the starboard bow. The ship’s 'apparent' pivot point will move forward in the direction of the movement causing the levers of the tug pushing force to change. This would cause the ship’s bow to swing to port and the stern tug would have a bigger lever than the bow tug.
July 2012: Professor Tae-Gweon Jeong (Nautical science researcher and lecturer)
The ‘new’ pivot point theory starts to build traction in the scientific community. Professor Jeong from the Korea Maritime University wrote a short two page summary of Captain Cauvier’s article and was convinced that the ‘traditional’ pivot point was “not real” and not the centre of leverage. He suggests that the COLR theory is adopted by ship handlers.
December 2012: J.E. Carreno (Hydrodynamics Researcher)
Dr. Carreno wrote a scientific paper on the shallow water effects on the ship’s pivot point and discusses a lot of the theory in Captain Cauvier’s article. The paper also expands on Dr. Seo’s equation.
January 2015: Prasad Perera (Hydrodynamics Researcher)
The paper develops the science of calculating the position of the ‘pivot point’ so that the algorithm can be used in ship movement prediction on integrated bridge systems. The paper proposes to “include various sensors for measuring the vessel position, heading, yaw rate and surge and sway acceleration components … [to] be an important part of future integrated bridge systems.” The simulated model of a turning ship looks like this diagram below. The paper acknowledges a lot of the work by Dr. Seo
December 2016: Dr Seong-Gi Seo (Hydrodynamics researcher and lecturer)
Dr. Seo published an updated paper on his work from 2011. He expands on explanation that the pivot point seen by the ship handler is an illusion therefore only the ‘apparent’ pivot point and not the actual centre of the ship’s rotation. Reasserts the theory that the pivot point is independent of surge motion of the ship and does not move towards the direction of the ship’s ahead or astern motion and does not move instantly but gradually.
He sends another nod to Captain Cauvier when he writes about the above scenario … “The account is mistaken in two aspects. One is that the pivot point is treated as a physical entity (as the fulcrum) … the other that the pivot point is treated as the cause. The correct explanation is that when the ship starts to move astern, the centre of lateral resistance moves sternwards from midship. Thus the reactive hydrodynamic forces providing an extra turning force about the centre of gravity. The tugs are pulling the ship to starboard. The starboard sway causing the pivot point to appear between the centre of gravity and the stern as the result.”
The paper also formulates an updated equation that shows that if sway speed and yaw speed are known then the position of the pivot point (even though it would be imaginary) can be calculated as a distance from the centre of mass (GP):
V + (GP x r) = 0
V is sway speed of G in meters per second, G is the centre of gravity, P is the Pivot Point, GP is the distance to P from G in meters and r is the yaw speed in radians per second.
The paper also explains again the results of a series of verification experiments by using the ‘updated’ pivot point understanding.
January 2018: A. Nedelcu et al. (Hydrodynamic research team)
Similar to the January 2015 paper of Prasad Perera, it uses a complex mathematical model to predict the position of the ‘apparent’ pivot point for ship manoeuvring simulation and future position prediction in an idealised condition with hydrodynamic influence.
July 2020: Doctor Knud Benedict (Ship Manourving Simulation researcher)
Dr. Benedict is a researcher in ship simulation modelling and ship manoeuvring prediction. He filmed two Youtube videos about the ship's pivot point in response to my previous article on the ship's pivot point. He makes some very useful points and so I thought it would be useful to refer you to his Youtube page.
www.youtube.com/channel/UCR7yLtA5eqRUHNfQLXfgueA/videos
If this link doesn't work type in "ISSIMS GmbH & Institute: Innovative Simulation" into the Youtube search bar ... and if you type Knud Benedict into the Youtube search bar you will also see of a video of Knud singing and playing guitar! He is multi talented it seems ;-)
References (in order refered to in the article)
"The Pivot Point" https://cultofsea.com/ship-handling/pivot-point/
Capt. H. Cauvier “The Pivot Point” – Article published in the United Kingdom Maritime Pilots’ Association “The Pilot”, October 2008, No.295
Dr. Seo "Rethinking the pivot point" - Article published in the Nautical Institute "Seaways" magazine, August 2011 http://mannedmodels.com/RethinkingPivotPoint.pdf
Dr. Seong-Gi Seo and Dr. M Mishu – “The Use of Pivot Point in Ship Handling for Safer and More Accurate Ship Manoeuvring” – Proceedings of IMLA, 1 October 2011, 1 (29), pp. 271-280 – https://ssudl.solent.ac.uk/id/eprint/2366/1/IMLA_Article(final).pdf
Capt. P. Butusina “The Pivot Point Revisited” – Article published in the United Kingdom Maritime Pilots’ Association “The Pilot”, Autumn 2011, No.306
Capt. P. Butusina and D. Dinu - "Ship' Pivot Point in Current and Swell" - PhD research paper www.pilotmag.co.uk/wp-content/uploads/2012/01/Pivot-point-final.pdf)
T-G Jeong - "A study on Comparison between Center of Lateral Resistance and Pivot Point being Used in Handling Ships at the Present time" (available www.koreascience.or.kr/article/CFKO201224542272818.page)
J.E. Carreno et al. "A study of shallow water's effect on a ship's pivot point" - Ing.Invesig. Vol.32 no.3 Bogota (available www.scielo.org.co/scielo.php?pid=S0120-56092012000300006&script=sci_arttext&tlng=pt)
P. Perara et al. "Ship Maneuvring Prediction under Navigation Vector Multiplication based Pivot Point Estimation" (available www.sciencedirect.com/science/article/pii/S2405896315021400)
Dr. Seong-Gi Seo “Safer and More Efficient Ship Handling with the Pivot Point Concept” - International journal of Marine Navigation and Safety of Sea Transportation in December 2016 (Volume 10, Number 4)
A. Nedelcu et al. "Ship Manoeuvring Prediction based on Pivot Point Estimation" SBNA Paper, Open Access (available www.anmb.ro/buletinstiintific/buletine/2018_Issue2/03_NTM/10.pdf)

